
Główna O nas Kontakt Projekty Timer NE555 ST6 Realizer Historia Linki
|
|
PROJEKTY ZAGRANICZNE |
ŁOWY NA LISA (Radiopelengacja sportowa)
Krzysztof Górski
Kit AVT-892
Sterownik powstał na prośbę osób zajmujących się Amatorską Radiolokacją Sportową ARS. Radiolokacja amatorska polega na lokalizowaniu położenia i odszukaniu ukrytych w terenie nadajników małej mocy za pomocą odbiorników z antenami kierunkowymi.
W zależności od częstotliwości amatorska radiolokacja sportowa prowadzona jest w paśmie 80 metrów (3,5MHz) gdzie stosowane są anteny ramowe, ferrytowe oraz w paśmie 2 metrów (144MHz) z zastosowaniem kilkuelementowych anten kierunkowych Yagi.
Do zlokalizowania ukrytego nadajnika niezbędne jest dokonanie namiarów z dwóch różnych miejsc punktów rys 1.
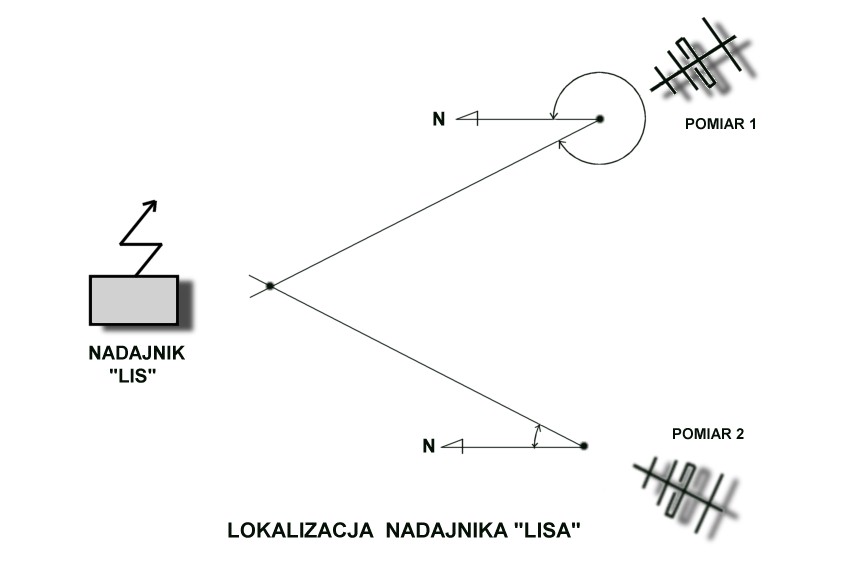
W każdym z nich trzeba określić kierunek, azymut z którego przychodzą sygnały i w porównaniu z kompasem nanieść na mapę. Wykreślone na mapie linie biegnące z obu punktów namiarów przetną się w miejscu , w którym znajduje się nadajnik, poszukiwana radiostacja. Uprawianie radiolokacji sportowej łączy w sobie umiejętności krótkofalarskie , sprawność fizyczną i umiejętności orientacji w terenie. Do organizowania zawodów na lisa potrzeba sześciu nadajników (lisów) które emitują ściśle określone sygnały. Nadajniki te należy rozmieszczać w odległościach nie mniejszych niż 750m jeden od drugiego. Wszystkie nadajniki powinny być słyszalne w punkcie startu Każda stacja nadawcza nadaje inny sygnał rozpoznawczy alfabetem morse’a w pięciu minutowych odstępach MOE; MOI; MOS; MOH; MO5. Praca nadajników musi być tak ustawiona aby radiostacje pracowały jedna po drugiej, według poniższego harmonogramu:
pierwsza minuta nadajnik nr1 znak MOE
druga minuta nadajnik nr2 znak MOI
trzecia minuta nadajnik nr3 znak MOS
czwarta minuta nadajnik nr4 znak MOH
piąta minuta nadajnik nr5 znak MO5
Jak zapewne zauważyliście znaki nadawane przez poszczególne nadajniki składają się z trzech liter dwie pierwsze litery są we wszystkich znakach takie same. Znaki różnią się tylko ostatnią literą. Dwie pierwsze litery są znakami alfabetu morse’a składającymi się z samych kresek a ostatnia litera składa się tylko z samych kropek i jest wyznacznikiem numeru nadajnika “lisa”. Tak na przykład litera S w alfabecie morse’a to są trzy kropki co odpowiada nadajnikowi nr3. Nadajniki w paśmie 3,5Mhz powinny pracować z emisją A1 telegrafią niemodulowaną natomiast w paśmie 144Mhz stosuje się emisję A2 telegrafię modulowaną. Sterownik nadajnika powinien pracować z prędkością 30-45 znaków na minutę. Częstotliwość pracy wszystkich nadajników powinna być jednakowa a stałość częstotliwości nie mniejsza niż 0.05%. Moc wyjściowa nadajników powinna wynosić od 3W do 5W.
Opis układu: Prezentowany sterownik generuje odpowiednie sygnały sterujące nadajnikiem w.cz. Po ustawieniu odpowiedniej konfiguracji zworek JP 1-3, układ może pracować jako jeden z pięciu “lisów”. Konstrukcja sterownika oparta jest na mikrokontrolerze ST62T20. Zgodnie z przeznaczeniem praca urządzenia odbywać się będzie w warunkach terenowych w związku z tym zasilanie realizowane jest z akumulatora. Aby ochronić akumulator przed nadmiernym wyładowaniem układ sterownika dodatkowo posiada opcję nadzoru napięcia zasilającego.
Układ składa się on z następujących bloków rys 2 :
mikrokontrolera
generatora podsłuchu
układu zabezpieczenia akumulatorów
układu rodzaju pracy nadajnika
układu synchronizacji startu

Blok mikrokontrolera steruje pracą całego układu według programu. Generator posłuchu zrealizowany na 555 umożliwia słuchowa kontrolę generowanego przez mikrokontroler ciągu kresek i kropek. Układ zabezpieczenia ma za zadanie pomiar napięcia akumulatora zasilającego i niedopuszczenie do jego całkowitego wyładowania.
Układem rodzaju pracy nadajnika dokonujemy wyboru rodzaju sygnału nadawanego MOI; MOE; MOS; MOH; MO5. Układem synchronizacji startu dokonujemy inicjacji wszystkich nadajników tak aby pracowały dokładnie jeden po drugim.
Schemat elektryczny urządzenia przedstawiono na rys 3. Jak widać sterownik wykorzystuje 11 z pośród 12 wyprowadzeń mikrokontrolera. Wyprowadzenie PA0 i PA1 skonfigurowane są jako push pull-output sterują one pracą diody dwukolorowej
D1 o wspólnej katodzie. Kolejne dwie linie PA2 i PA3 również są skonfigurowane jako push pull-output, sterują one pracą tranzystorów T1 odpowiedzialnego za kluczowanie nadajnika i T2 blokującego zasilania. Wyprowadzenia PB0 i PB1 ( input with pull-up) są wejściami do których dołączone są przyciski P1 START oraz P2 SYNCHRONIZACJA z zaciskiem synchronizacyjnym. Przez linię PB3 (push pull-output)odbywa się sterowanie pracą generatora podsłuchu. Układ zabezpieczenia (R10, R11) dołączony jest to wejścia PB4 skonfigurowanego jako wejście przetwornika analogowo cyfrowego. Wyprowadzenia PB5, PB6, PB7 skonfigurowane są jako input with pull-up do których dołączone są zworki JP1-JP3 konfigurujące rodzaj pracy nadajnika.
Działanie układu. Wykorzystanie mikrokontrolera pozwoliło ograniczyć liczbę użytych elementów do minimum oraz usprawniło działanie układu. Po włączeniu zasilania całego systemu mikrokontroler przechodzi standardowy proces zerowania. Przeprowadzony jest on przy pomocy specjalnie do tego przeznaczonego układu typu DS1813. Zastosowanie tego układu rozwiązuje ewentualne problemy z doborem pojemności i rezystancji w przypadku zastosowania układu standardowego złożonego z kondensatora i rezystora.
Po restarcie procesor jest w stanie OCZEKIWANIA na zdarzenia START lub SYNCHRONIZACJA inicjujące pracę programu. Warunek START zaistnieje w chwili podania niskiego stanu na wejściu PB0 (input with pull-up) przyciskiem P1. Bezpośrednim skutkiem zdarzenia START jest przejście programu mikrokontrolera w stan PRACA CIĄGŁA. Program zaczyna generować na wyjściu PA2 ciąg impulsów które poprzez rezystor R5 podane są na bazę tranzystora T1 sterującego pracą nadajnika w.cz. Jednocześnie ten stan pracy sygnalizowany jest zapaleniem się diody LED D1 na kolor zielony. Jeżeli układ sterownika chcemy wykorzystać do pracy grupowej razem z innymi sterownikami powinniśmy wykonać ich synchronizację. Synchronizacje wykonujemy poprzez jednoczesne naciśnięcie przycisku P2 we wszystkich urządzeniach. Możemy również wykonać poprzez połączenie wszystkich razem zacisków synchronizujących przewodem i naciśnięcie któregoś z przycisków P2. W wyniku naciśnięcia przycisku P2 zostanie na wyprowadzenie PB1 mikrokontrolera podany stan niski który jest spełnieniem warunku SYNCHRONIZACJA. Następstwem jest przejście mikrokontrolera w stan PRACA GRUPOWA program zaczyna generować na wyjściu PA2 przez minutę ciąg impulsów w odstępach pięciominutowych. Ten stan pracy również sygnalizowany jest zapaleniem się diody LED D1 na kolor zielony.
Tak jak już wcześniej wspomniałem mamy możliwość wyboru rodzaju emitowanego sygnału ( MOI; MOE; MOS; MOH; MO5).
Dokonujemy tego poprzez odpowiednie ustawienie zworek na wyprowadzeniach PB5,PB6,PB7 i tak aby układ wygenerował ciąg impulsów odpowiadających literom MOI (-- --- **) należy na wejściu PB5(JP3) i PB7(JP1) założyć zworki, wejście PB6(JP2)bez zwory. Kombinacja położeń zworek z jednoczesnym przedstawieniem generowanego sygnału zawarta jest w tabelce rys 4.
W przypadku emitowanego sygnału MO5 kiedy JP1 jest bez zworki, ustawienia pozostałych zworek nie mają żadnego wpływu na rodzaj generowanego sygnału. Dopiero założenie JP1 powoduje uaktywnienie wejść PB5 i PB6.
Podczas pracy sterownika układ zabezpieczenia akumulatora nieustannie dokonuje pomiaru napięcia zasilającego. Na wejście PB4 przetwornika A/C podawane jest napięcie z dzielnika R10 22kW , R11 5,7kW . Po przetworzeniu na binarne słowo 8 bitowe UBYTE wynik porównywany jest programowo ze stałą określającą próg napięcia dopuszczalnego na akumulatorze. Jeżeli wynik pomiaru jest większy od wartości progowej dioda Led D1 świeci kolorem zielonym. W przypadku kiedy wynik pomiaru napięcie na akumulatorze jest niższy układ automatycznie wyłącza nadajnik i dioda LED D1 świeci kolorem czerwonym. Generator podsłuchu sterowany jest z wyprowadzenia PB3 mikrokontrolera impulsy są zgodne z impulsami na bazie tranzystora T1. Generator jest standardową aplikacją NE555 zrealizowaną jako generator astabilny, który po podaniu na wejście stanu wysokiego generuje na wyjściu ciąg impulsów. Częstotliwość możemy sobie wyliczyć ze wzoru
f(Hz) =1,49/(R8+R9[W ])xC5(F).Do wyjścia generatora podsłuchu podłączony jest przetwornik piezoelektryczny.
Montaż i uruchomienie układu: Po zgromadzeniu wszystkich niezbędnych elementów i wykonaniu płytki według wzoru rys.5 lub też zamówieniu w ofercie AVT kompletnego kitu, możemy przystąpić do montażu.

Z wykonaniem montażu nie powinniśmy mieć większych problemów. Niewielka ilość elementów użytych w projekcie oraz nieduże wymiary upraszczają konstrukcje w sposób istotny. Praktycznie po zaprogramowaniu mikrokontrolera i osadzeniu jego w podstawce sterownik może działać od razu. Przed tym jednak powinniśmy dobrać wartość rezystancji rezystorów R11 i R10. Należy rezystory dobrać tak aby na wejściu mikrokontrolera PB4 (skonfigurowane jako wejście A/C)napięcie wynosiło 2,68V przy maksymalnym napięciu zasilającym z akumulatora +13V.Możemy to zrobić w następujący sposób w miejsce rezystorów R10 i R11 wlutowujemy potencjometry o wartości około 47kW do pin11 podstawki procesora podłączamy miernik do pomiaru napięcia. Regulowanym zasilaczem ustawiamy napięcie zasilania na 13V. Następnie suwakami potencjometrów dokonujemy regulacji aż do uzyskania napięcia o wartości 2,68V. Kolejnym krokiem jest ostrożne odlutowanie potencjometrów i pomiar omomierzem ustawionych rezystancji.
Z szeregu najpopularniejszych rezystorów wybieramy o wartości odpowiadającej ustawionej przez potencjometry.
Układ najlepiej umieścić razem z nadajnikiem w.cz w obudowie plastykowej możliwie jak najbardziej kroploszczelnej. Na obudowie umieszczamy główny włącznik zasilania, dioda LED, przycisk START i SYNCHRONIZACJA, zacisk synchronizacyjny, oraz zacisk antenowy nadajnika. Dobierając obudowę musimy również uwzględnić miejsce na akumulator. Myślę że układ będzie doskonały narzędziem dla osób i klubów zajmujących się radio orientacją sportową.
Tabelka ustawień zworek:
|
JP1 |
JP2 |
JP3 |
|
|
MOE |
ZWORA |
ZWORA |
BRAK |
|
MOI |
BRAK |
ZWORA |
BRAK |
|
MOS |
ZWORA |
BRAK |
BRAK |
|
MOH |
ZWORA |
ZWORA |
ZWORA |
|
MO5 |
DOWOLNIE |
DOWOLNIE |
ZWORA |
Spis Elementów:
Rezystory:
R1, R2 2,2kW
R3, R4 820W
R5, R6 3,9kW
R7, R10 22kW
R8, R9 100kW
R11, 5,6kW
Kondensatory:
C1 470m F/25V
C2 100m F/16V
C3, C4 30pF
C5 100nF
C6 10nF
Półprzewodniki:
T1, T2 BC238
D1 LED dwukolorowa
US1 ST62T20
US2 NE555
US3 78L05
US4 DS1813
Inne:
X1 Kwarc 8Mhz
Piezo - Przetwornik piezoelektryczny dowolny


